Układy napędowe to zaraz po silniku najważniejsza część łodzi. Wszystkie osiągnięcia łodzi takie jak prędkość, przyspieszenie, manewrowość, sprawność oraz samo przeznaczenie łodzi zależy od wybranego przez użytkownika układu napędowego. Najczęściej spotykanym układem napędowym jest układ śruby na sztywnym wale. Moment napędowy przekazywany jest z silnika poprzez przekładnie redukcyjno-nawrotną na wał, na którym obsadzona jest śruba napędowa. Sam wał obsadzony jest w tzw. pochwie wału, która w zależności od budowy oraz materiału, z którego jest wykonana łódź wkomponowana jest w kadłub. W zależności od mocy silnika stosuje się wały o różnej średnicy (coraz większej wraz ze wzrostem mocy silnika), natomiast pochwa wału może być wyposażona w jedno, dwa a nawet trzy łożyska smarowane wodą. Układ sterowania wykonany jest w postaci płyty sterowej znajdującej się za śrubą napędową. Czasami spotykamy dwie płyty sterowe po bokach śruby napędowej. Taki układ sterowy cechuje się małą sprawnością przy niskich prędkościach obrotowych silnika.
Układ ze sztywnym wałem spotykany jest na łodziach wypornościowych, łodziach rybackich, łodziach ratunkowych, dużych łodziach żaglowych z dodatkowym silnikiem manewrowym. Innym układem napędowym jest układ typu ”Z”. Jest on często spotykany na szybkich łodziach rekreacyjnych, łodziach turystycznych, łodziach służb branżowych. System ten stosowany jest przez wiele firm produkujących silniki stacjonarne Mercruiser, Volvo Penta, Yanmar i wykorzystywany przez innych producentów silników stacjonarnych. Nazewnictwo tego układu wynika ze sposobu ułożenia wałów przeniesienia mocy. Poziomy wał wejścia mocy do skrzyni/przekładni, pionowy wał przekazania mocy oraz poziomy wał zdawczy, na którym osadzona była śruba napędowa. Układ napędowy typu „Z” daje możliwość manewrowości przód-tył oraz sterowania prawo-lewo. Dzięki takiemu rozwiązaniu nie wymaga dodatkowej skrzyni redukcyjno-manewrowej oraz stosowania steru za śrubą. Dodatkowo daje możliwość redukowania obrotów silnika w zależności od potrzeby.
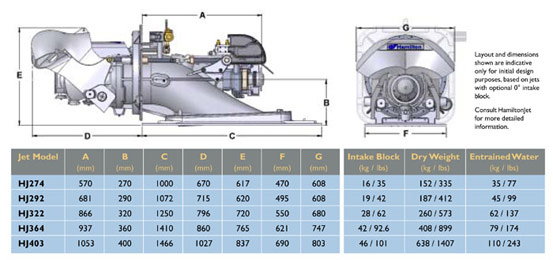
Kolejnym układem napędowym jest układ JET. Stosowany wszędzie tam gdzie najważniejsze jest całkowite zanurzenie łodzi. Głównym użytkownikiem takich układów napędowych są służby branżowe takie jak wojsko, służby ratunkowe, policja. Napędzane są głównie stacjonarnymi silnikami diesla. Z powodu sposobu przeniesienia napędu ich sprawność jest niższa o 30 % od układów typu Z oraz układu na sztywnym wale. Moment napędowy przekazywany jest za pomocą strumienia wody wytworzonego przez bardzo wydajna pompę wody napędzaną przez silnik stacjonarny. Nie wymagają skrzyni nawrotnej ale często widzimy że jest ona stosowana w celu dopasowania obrotów silnika do JET oraz tzw. płukania/czyszczenia kosza pędnika. Układ ten wymaga specyficznej budowy kadłuba który zapewni odpowiedni i niezakłócony napływ wody do kosza ssącego wodę. Przed wyborem takiego układu napędowego zalecane jest skontaktowanie się z producentem w celu dobrania odpowiedniego modelu pędnika. Niewłaściwe dobranie pędnika może spowodować że silnik nie osiągnie prędkości znamionowej a to może doprowadzić do przeciążenia silnika oraz nieosiągnięcie prędkości projektowej łodzi.
Ostatnim przez nas omawianym układem napędowym jest napęd powierzchniowy zwany SURFACE DRIVE. Układ ten jest dedykowany do szybkich łodzi komercyjnych oraz rekreacyjnych. Układ ten jest pewną odmianą układu śruby na wale z tym że w przypadku surface drive wał posiada możliwość skrętu oraz trymu. Dzięki takiemu rozwiązaniu łodzie wyposażone w taki układ mogą podobnie jak napędy JET wpływać na płycizny, oraz podobnie jak napędy „Z” skręcać bez konieczności stosowania płyty sterowej za śrubą. Stosowanie takiego układu poprawia o około 15% prędkość łodzi, manewrowość oraz zmniejsza zanurzenie całkowite. Dodatkowo dzięki takiemu rozwiązaniu obniżają się koszty związane z wykonaniem przeglądów okresowych, które wielokrotnie z powodu wysokich kosztów wynajęcia dźwigu sięgają kilku tysięcy złotych. Obecnie na rynku możemy spotkać kilka rozwiązań napędów powierzchniowych dwu i jedno śrubowych.